Sampling Based Path Planning Potential Guided Rrt Information Center
Get comprehensive updates, key reports, and detailed insights compiled from verified editorial sources.
History
Stay updated on Sampling Based Path Planning Potential Guided Rrt's latest milestones.

Full Guide
Data is compiled from public records and verified media reports.
Last Updated: June 18, 2026
Future Outlook

For 2026, Sampling Based Path Planning Potential Guided Rrt remains one of the most searched-for profiles.
Core Information

Explore the primary sources for Sampling Based Path Planning Potential Guided Rrt.
About to Sampling Based Path Planning Potential Guided Rrt

The following papers were used as reference for this video: [1] Hussain Qureshi, A., & Ayaz, Y. (2017). See the other videos in this series: This video ... A video for our IJRR 2022 paper, "Adaptively Informed Trees (AIT*) and Effort Informed Trees (EIT*): Asymmetric bidirectional ... This is a video supplement to the book "Modern Robotics: Mechanics, Authors: Brady Moon, Nayana Suvarna, Andrew Jong, Satrajit Chatterjee, Junbin Yuan, Muqing Cao, and Sebastian Scherer ...
Video Highlights & Reports
Below is a handpicked selection of video coverage regarding Sampling Based Path Planning Potential Guided Rrt.
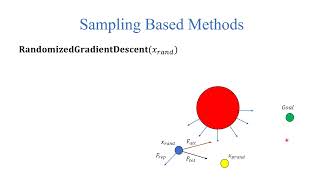
Sampling Based Path Planning: Potential Guided RRT*
Path Planning with A* and RRT | Autonomous Navigation, Part 4
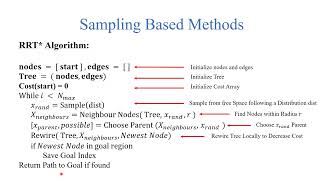
Sampling Based Path Planning: RRT*
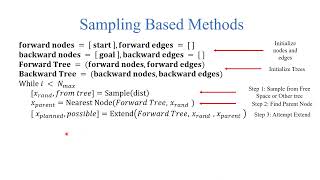
Sampling Based Path Planning: Bidirectional RRT Algorithm
Disclaimer:













![Sampling-based Methods [Lecture, Marija Popović]](https://i0.wp.com/ytimg.googleusercontent.com/vi/CrQJAtPn8sY/mqdefault.jpg?resize=320,180)

![Motion Planning Algorithms (RRT, RRT*, PRM) - [MIT 6.881 Final Project]](https://i0.wp.com/ytimg.googleusercontent.com/vi/gP6MRe_IHFo/mqdefault.jpg?resize=320,180)


