Generic Control Method For Soft Robot Information Center
Get comprehensive updates, key reports, and detailed insights compiled from verified editorial sources.
Video Highlights & Reports
Below is a handpicked selection of video coverage regarding Generic Control Method For Soft Robot.

Generic Control Method for Soft-Robot
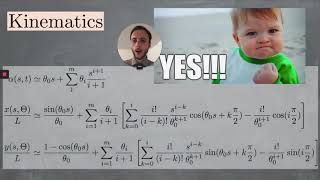
Control oriented modeling of soft robots: the polynomial curvature case

Soft Robotics Toolkit

MakeSense: Automated Sensor Design for Proprioceptive Soft Robots
Latest News
Stay updated on Generic Control Method For Soft Robot's latest milestones.

Important Facts

Explore the main sources for Generic Control Method For Soft Robot.
Full Guide
Data is compiled from public records and verified media reports.
Last Updated: June 6, 2026
Future Outlook

For 2026, Generic Control Method For Soft Robot remains one of the most searched-for profiles.
Introduction to Generic Control Method For Soft Robot

Authors: Cosimo Della Santina, and Daniela Rus Title: D. Bruder, B. Gillespie, C. D. Remy, and R. Vasudevan, “Modeling and Researchers at Caltech and at Harvard have developed Li Tiefeng said: "Life lives in this universe by its own 'Doing the robot' on the dancefloor would look more like 'doing the worm' if the dance move was inspired by Compliant Systems Design Laboratory, University of Michigan.
In this recent T-RO paper, the authors use Physics-Informed Neural Networks (PINNs) to build generalizable, fast surrogate ... In a study published online in the Proceedings of the National Academy of Sciences, Kinematic Modeling and Observer Based Control of Soft Robot using Real Time Finite Element Method This is the accompanying video for our paper entitled "Modeling and Researchers at TU Delft have developed highly programmable actuators that, similar to the human hand, combine
Disclaimer:


















