F1tenth Lab6 Pure Pursuit Python Node Berlin Map Information Center
Get comprehensive updates, key reports, and detailed insights compiled from verified editorial sources.
About on F1tenth Lab6 Pure Pursuit Python Node Berlin Map

Technion F1Tenth - Follow The Gap (Fast) Demo - 18.1.23 In this lecture we will learn about the autonomous vehicle planning and control stack, and deep dive into the Holonomic drivetrain autonomously following rectangular path using the purepursuit algorithm and roadrunner localization. In this lab, I have implemented an auto-navigation system for the car using PID Controller to complete 1 complete loop. Technion F1Tenth - Follow The Gap (Slow) Demo - 18.1.23 Follow the gap implementation using disparity extension with added dynamic thresholding.
Core Information

Explore the main sources for F1tenth Lab6 Pure Pursuit Python Node Berlin Map.
Detailed Analysis
Data is compiled from public records and verified media reports.
Last Updated: June 18, 2026
Developments
Stay updated on F1tenth Lab6 Pure Pursuit Python Node Berlin Map's latest milestones.
Video Highlights & Reports
Below is a handpicked selection of video coverage regarding F1tenth Lab6 Pure Pursuit Python Node Berlin Map.
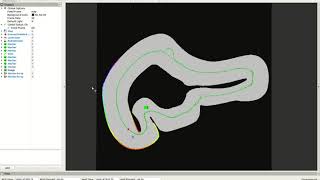
F1Tenth Lab6 - pure_pursuit Python node Berlin Map
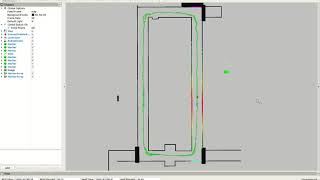
F1Tenth Lab6 - pure_pursuit Python node Levine_blocked map
Pure Pursuit F1 tenth demo Lab 6

F1 Tenth Pure Pursuit Implementation
Conclusion

For 2026, F1tenth Lab6 Pure Pursuit Python Node Berlin Map remains one of the most searched-for profiles.
Disclaimer:



















