06 Point Cloud Registration Ransac Icp Algorithm Explained Open3d Python Information Center
Get comprehensive updates, key reports, and detailed insights compiled from verified editorial sources.
Video Highlights & Reports
Below is a handpicked selection of video coverage regarding 06 Point Cloud Registration Ransac Icp Algorithm Explained Open3d Python.
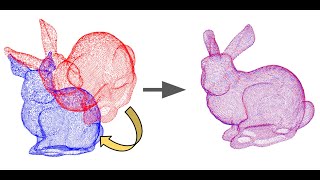
06 - Point Cloud Registration: RANSAC + ICP Algorithm Explained | Open3D Python

Iterative Closest Point (ICP) - Computerphile
ICP & Point Cloud Registration - Part 2: Unknown Data Association (Cyrill Stachniss, 2021)
ICP & Point Cloud Registration - Part 1: Known Data Association & SVD (Cyrill Stachniss, 2021)
Latest News
Stay updated on 06 Point Cloud Registration Ransac Icp Algorithm Explained Open3d Python's latest milestones.

Conclusion

For 2026, 06 Point Cloud Registration Ransac Icp Algorithm Explained Open3d Python remains one of the most talked-about profiles.
Key Details

Explore the primary sources for 06 Point Cloud Registration Ransac Icp Algorithm Explained Open3d Python.
Overview on 06 Point Cloud Registration Ransac Icp Algorithm Explained Open3d Python

You've scanned a room or object and now you have lots of discrete scans you want to fit together. Dr Mike Pound explains how ... Note: The derived SVD solution contains a small mistake. Either one has to swap the Inside my school and program, I teach you my system to become an AI engineer or freelancer. Life-time access, personal help by ... We present a novel, end-to-end learnable, multiview 3D Welcome to our channel, where we explore the fascinating realm of processing
Deep Dive
Data is compiled from public records and verified media reports.
Last Updated: June 15, 2026
Disclaimer:















