Cable Driven Robot Information Center
Get comprehensive updates, key reports, and detailed insights compiled from verified editorial sources.
Video Highlights & Reports
Below is a handpicked selection of video coverage regarding Cable Driven Robot.

Extreme Fast Cable-Driven Parallel Robot
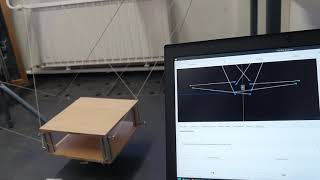
RopeBot - Prototype 3: A simple redundant cable-driven robot with all degrees of freedom

Cable driven parallel robot 90 degree tilting at the tool by red cable robots

Cable-driven parallel robots – Motion simulation i
Main Features

Explore the key sources for Cable Driven Robot.
Deep Dive
Data is compiled from public records and verified media reports.
Last Updated: June 19, 2026
Conclusion

For 2026, Cable Driven Robot remains one of the most searched-for profiles.
Introduction to Cable Driven Robot

SEGESTA Universität Duisburg-Essen Lehrstuhl für Mechatronik. RopeBot is back... for almost two years there were no new videos on YouTube. But a lot has happened in that time. The student ... Demo for tilting an object or tool by 90° (2x 45°). We build industrial Proud of being one of the first humans to have the opportunity trying the This is the second prototype of the project RopeBot. The main control loop is implemented in C++ and runs on a Raspberry Pi 3B. The idea is simple: Throw a dart in the direction of the dartboard and the board will move automatically to hit the desired field.
This is a tensegrity flexible manipulator that operates using This video demonstrates the design and functionality of a
Developments
Stay updated on Cable Driven Robot's latest milestones.

Disclaimer:

















